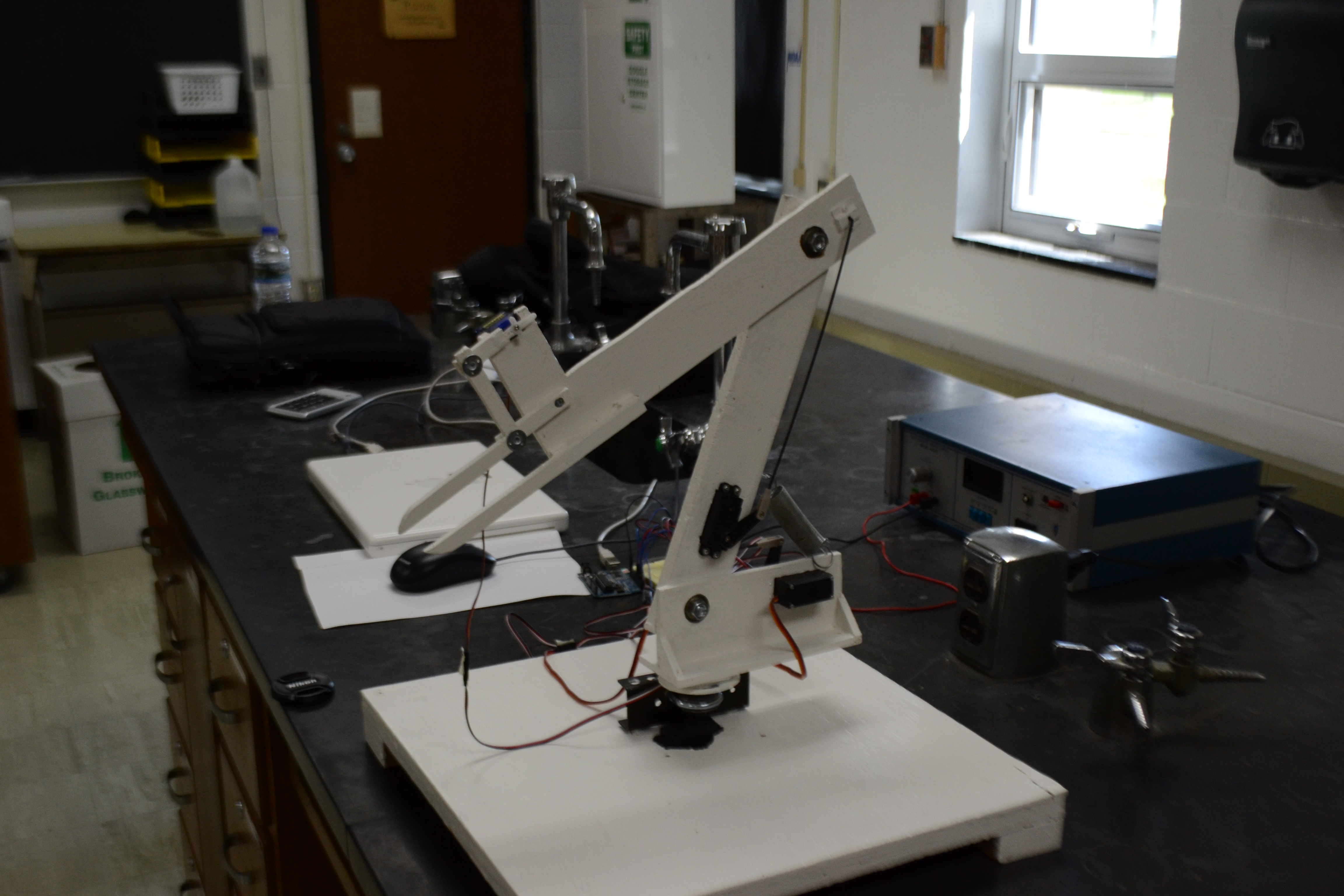
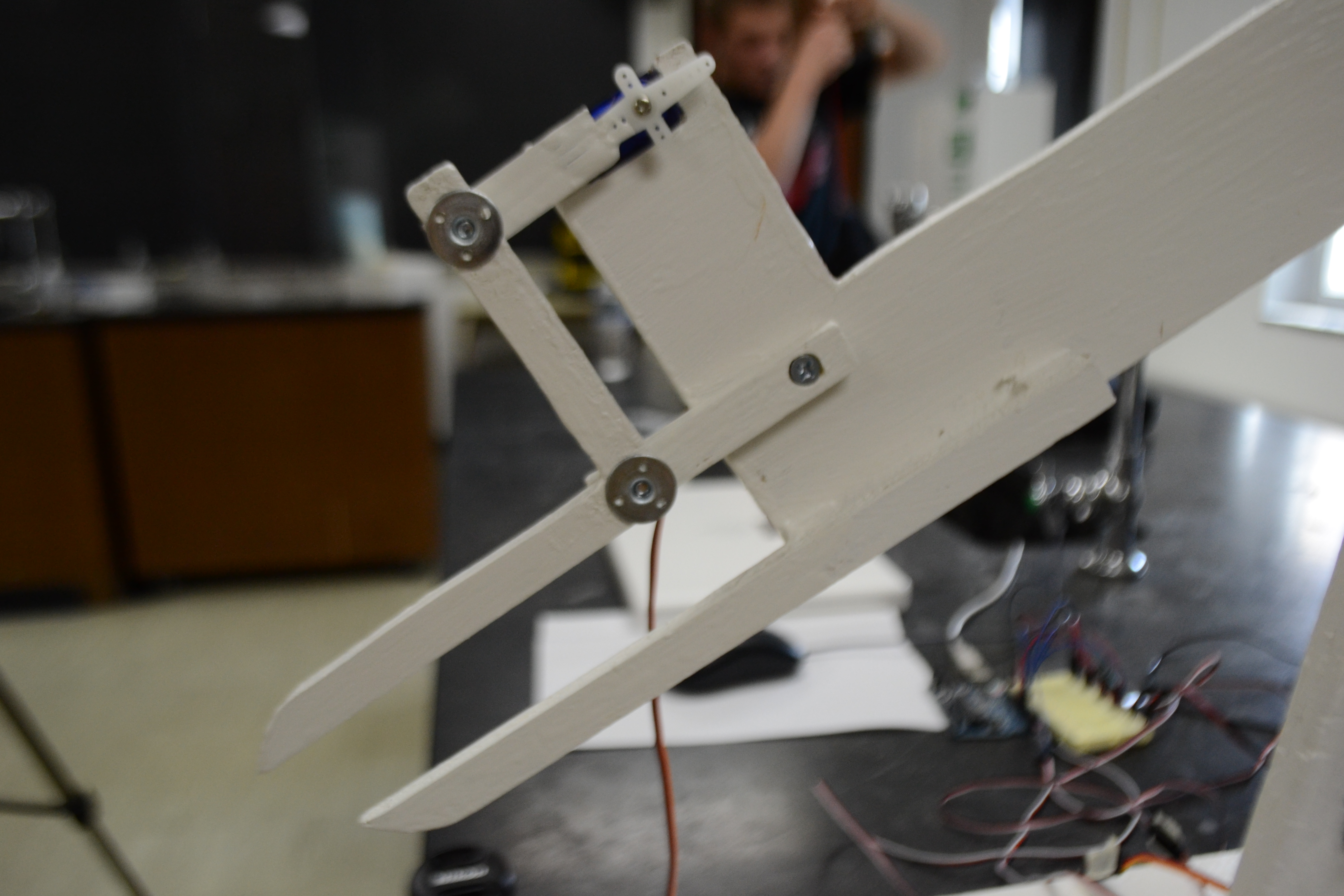
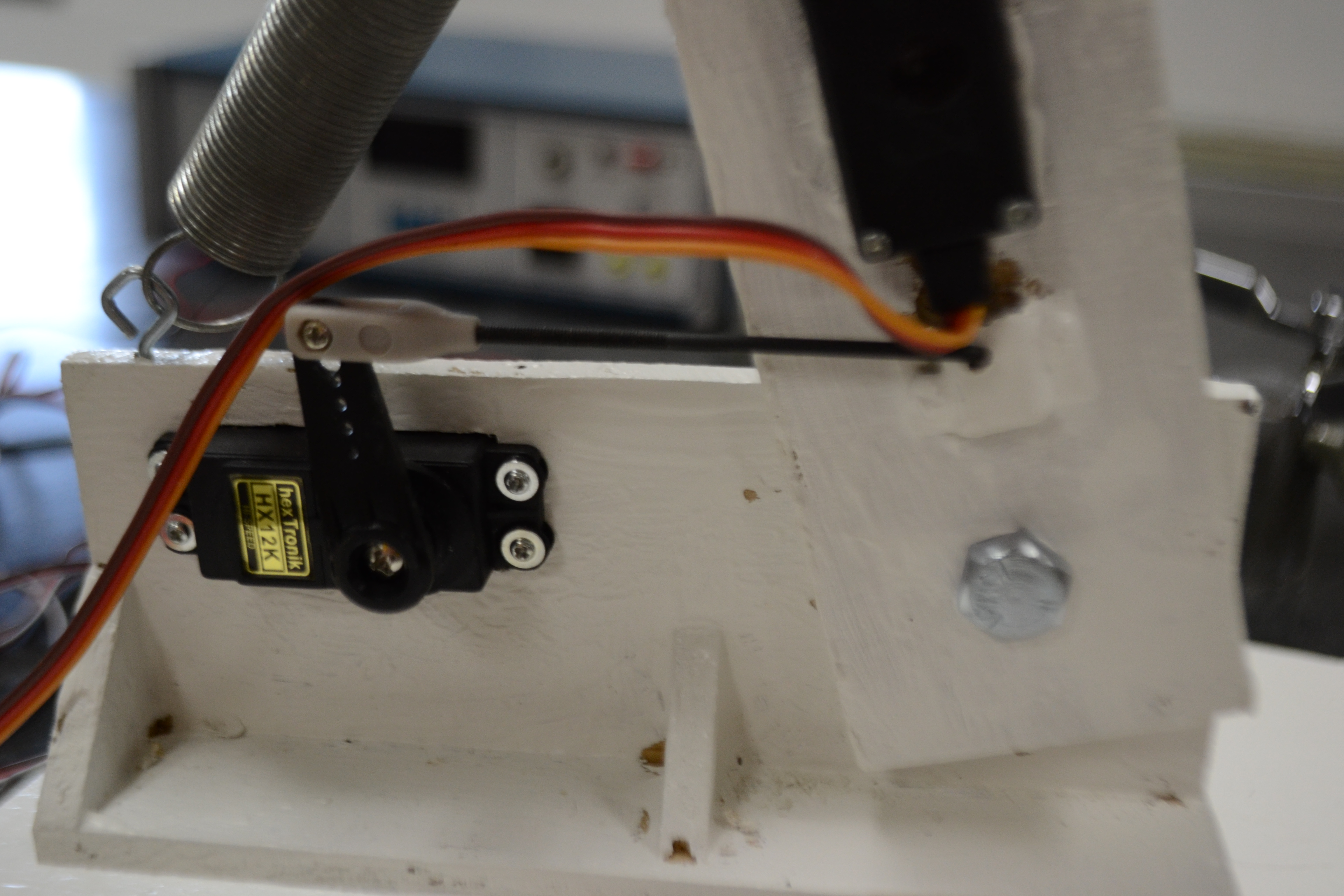
Robotic Arm
A 3DOF robotic arm controlled through the computer. An animated rig in Blender is the control center and calculates the Inverse Kinematics for the joints. This data is sent through USB and received by an Arduino, which in turn controls the servos.